Zehao HuangCurrently, I am taking a short break to explore new opportunities. From 2017 to 2024, I worked at TuSimple in Beijing, leading a small team focused on solving real-world perception problems in truck autonomous driving.
|

|
Work Experience:
TuSimple: Tech Lead (2017.10 - 2024.03):
|
Research Interests:
|
Selected Publications:(* Interns, + Equal contribution) |
|
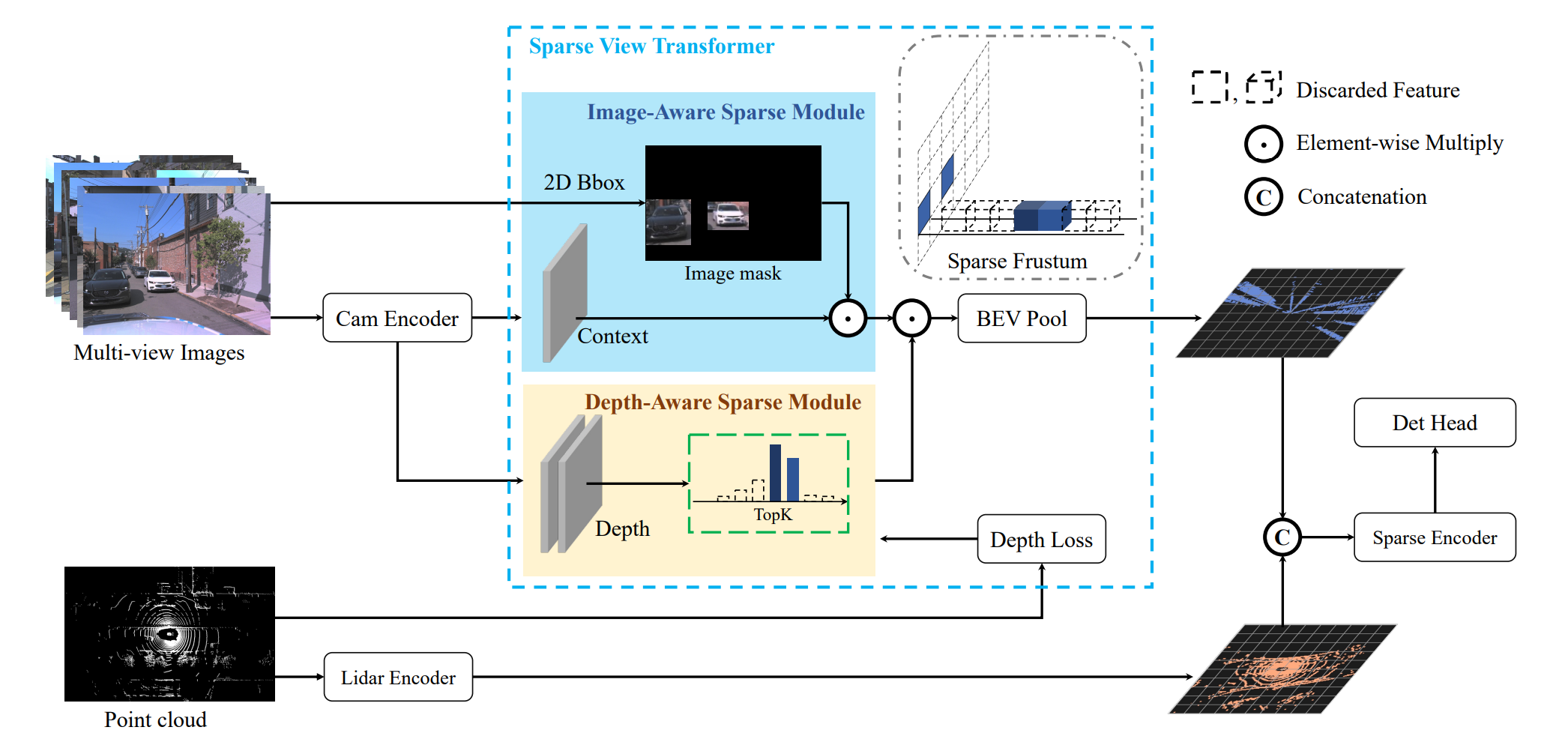
SparseFusion: Efficient Sparse Multi-Modal Fusion Framework for Long-Range 3D PerceptionYiheng Li*, Hongyang Li, Zehao Huang, Hong Chang, Naiyan Wang arXiv, 2024 arxiv A simple sparse fusion framework for long-range 3D perception. |
|
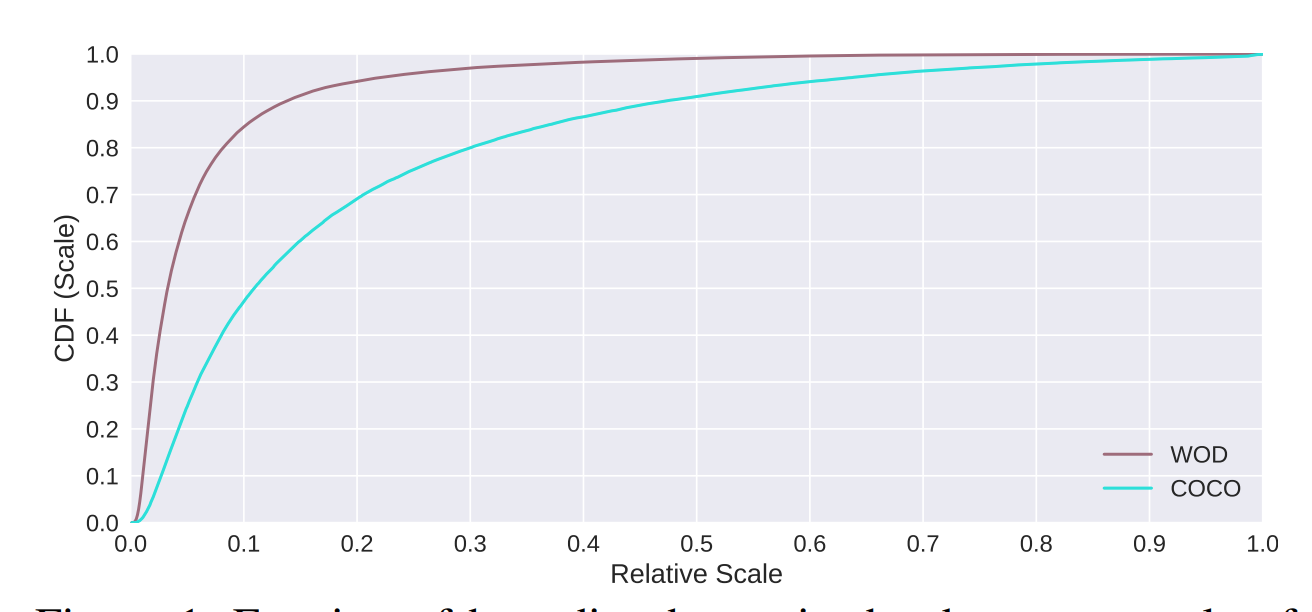
TSTTC: A Large-Scale Dataset for Time-to-Contact Estimation in Driving ScenariosYuheng Shi*, Zehao Huang, Yan Yan, Naiyan Wang, Xiaojie Guo arXiv, 2023 arxiv / code / website We construct a dataset for Time-to-Concact (TTC) Estimation in driving scenarios and provide several baseline methods. |
|
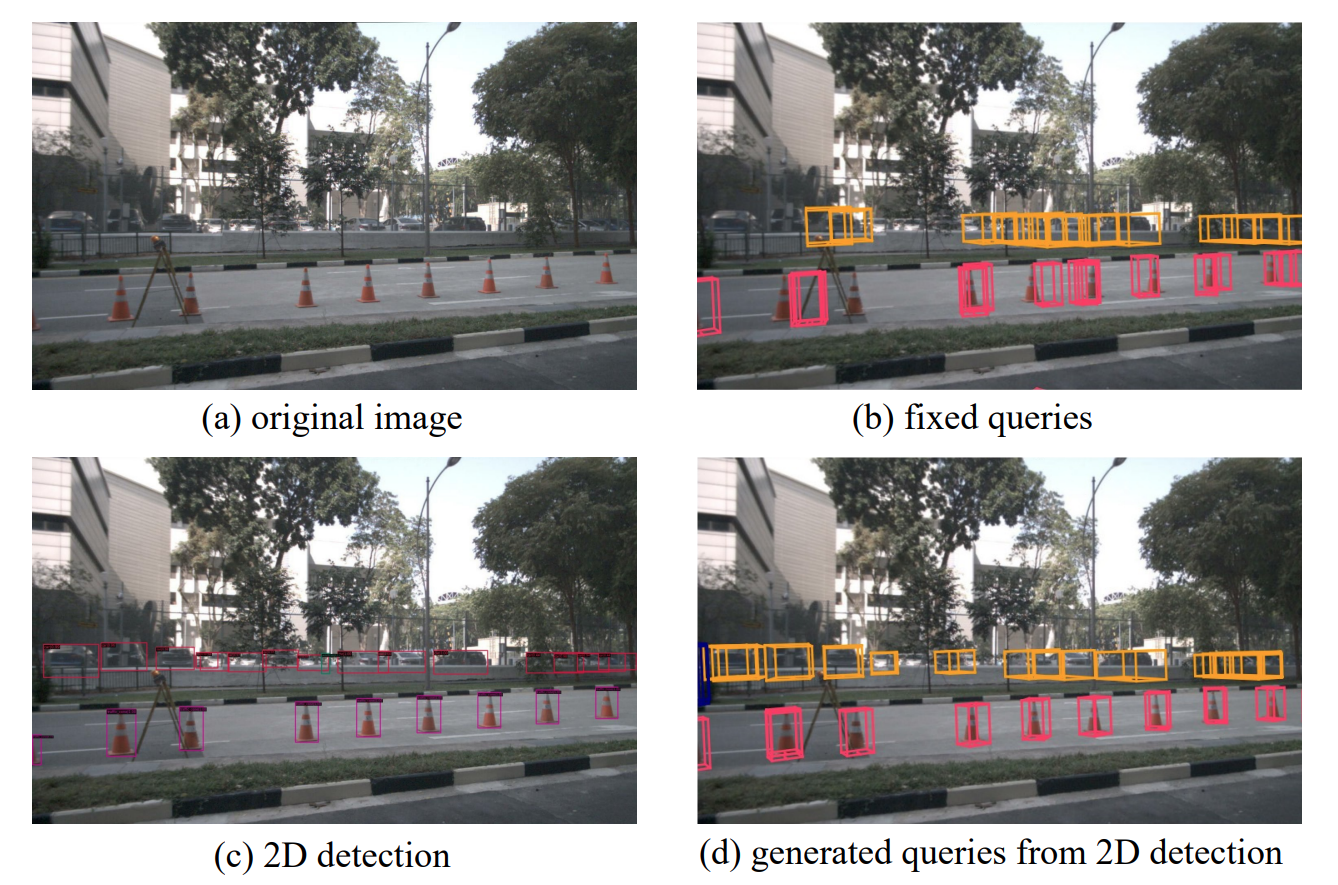
Object as Query: Lifting any 2D Object Detector to 3D DetectionZitian Wang*, Zehao Huang, Jiahui Fu, Naiyan Wang, Si Liu ICCV, 2023 arxiv / code We design Multi-View 2D Objects guided 3D Object Detector (MV2D), which can lift any 2D object detector to multi-view 3D object detection. |
|
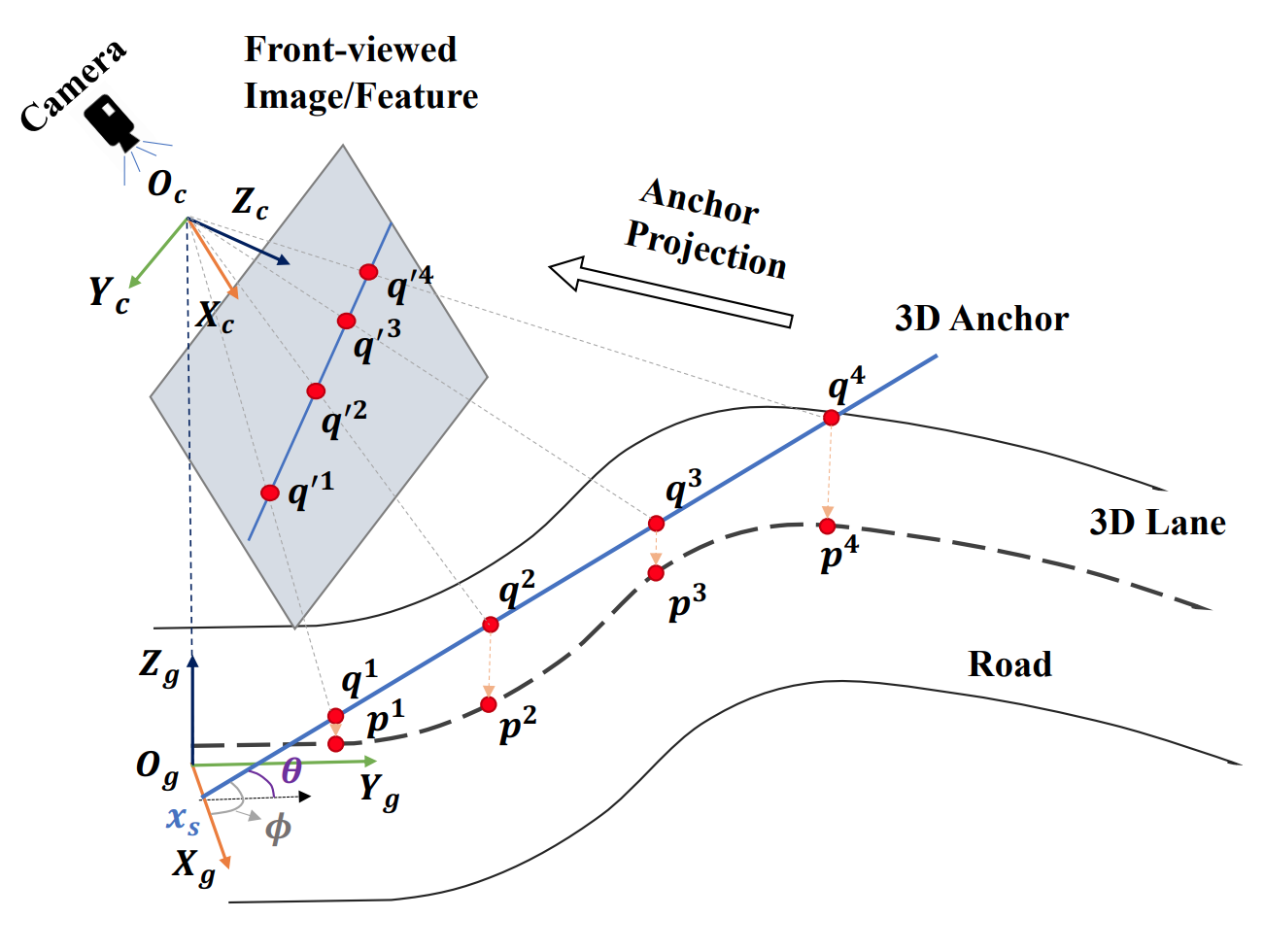
Anchor3dlane: Learning to regress 3d anchors for monocular 3d lane detectionShaofei Huang*, Zhenwei Shen, Zehao Huang, Zi-han Ding, Jiao Dai, Jizhong Han, Naiyan Wang, Si Liu CVPR, 2023 arxiv / code We define 3D lane anchors in the 3D space and propose a BEV-free method named Anchor3DLane to predict 3D lanes directly from perspective view representations. |
|
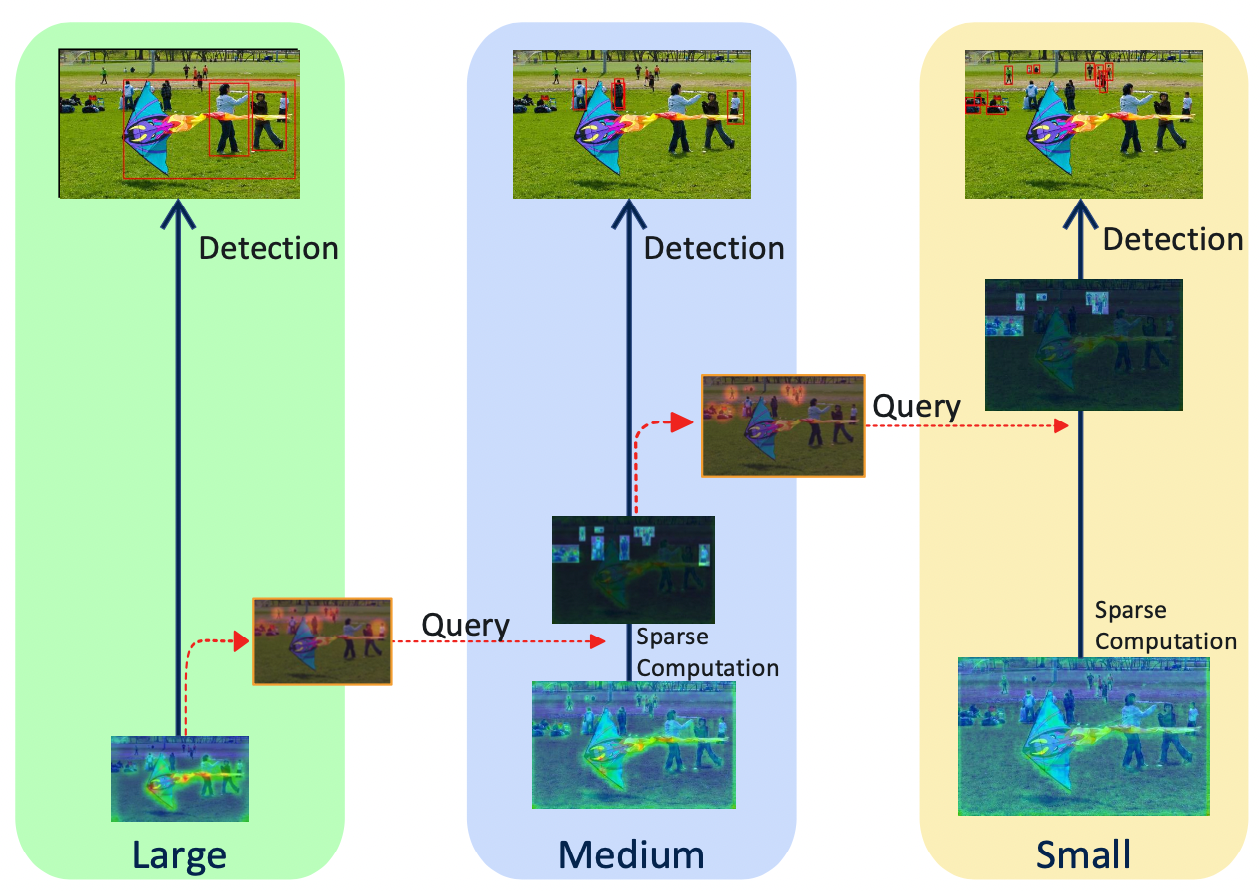
QueryDet: Cascaded Sparse Query for Accelerating High-Resolution Small Object DetectionChenhongyi Yang*, Zehao Huang, Naiyan Wang CVPR (Oral), 2022 arxiv / code We propose QueryDet that uses a novel query mechanism to accelerate the inference speed of feature-pyramid based object detectors |
|
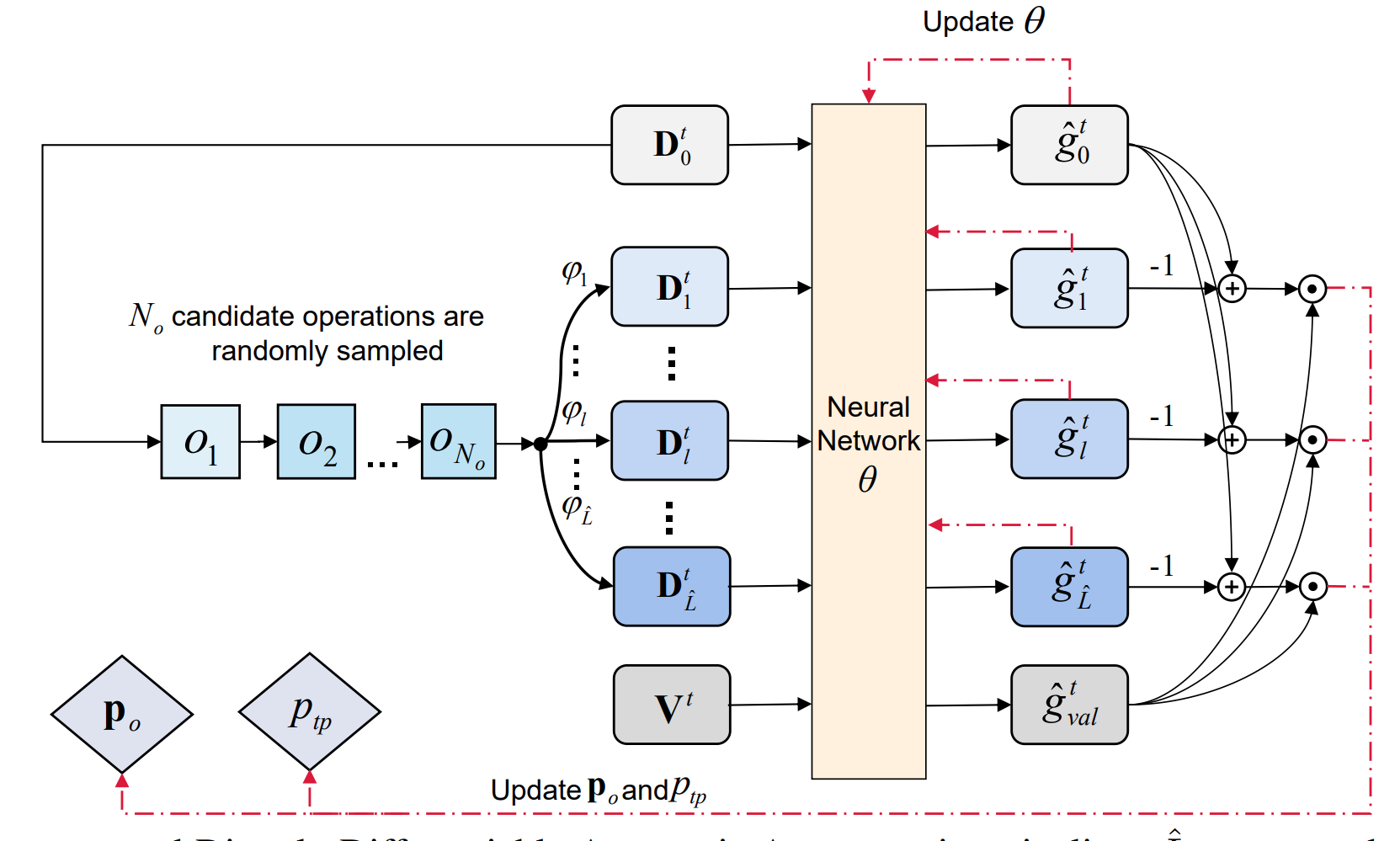
Direct Differentiable Augmentation SearchAoming Liu*, Zehao Huang, Zhiwu Huang, Naiyan Wang ICCV, 2021 arxiv / code We propose an efficient differentiable search algorithm called Direct Differentiable Augmentation Search (DDAS). It exploits meta-learning with one-step gradient update and continuous relaxation to the expected training loss for efficient search. |
|
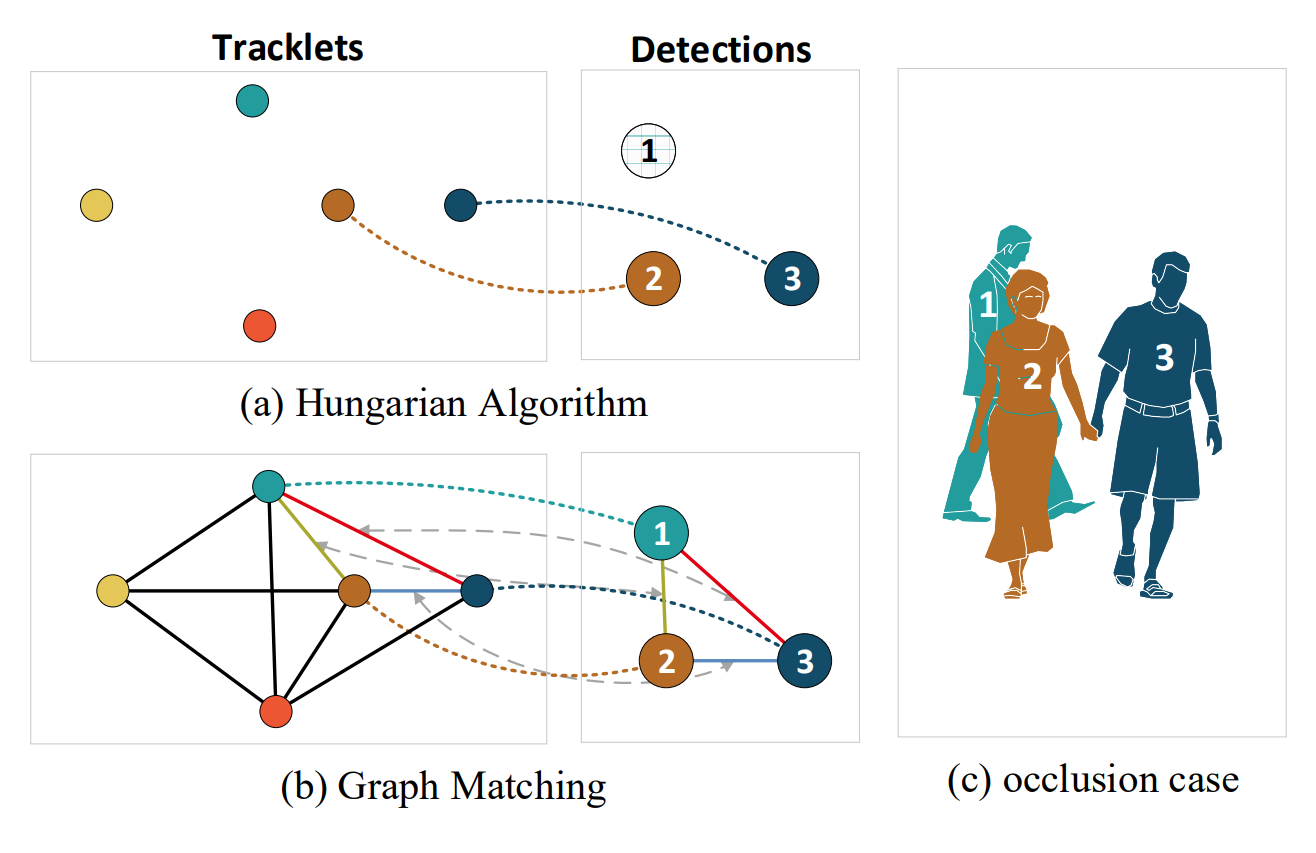
Learnable Graph Matching: Incorporating Graph Partitioning with Deep Feature Learning for Multiple Object TrackingJiawei He*, Zehao Huang, Naiyan Wang, Zhaoxiang Zhang CVPR, 2021 arxiv / code We propose a learnable graph matching method for object tracking. |
|
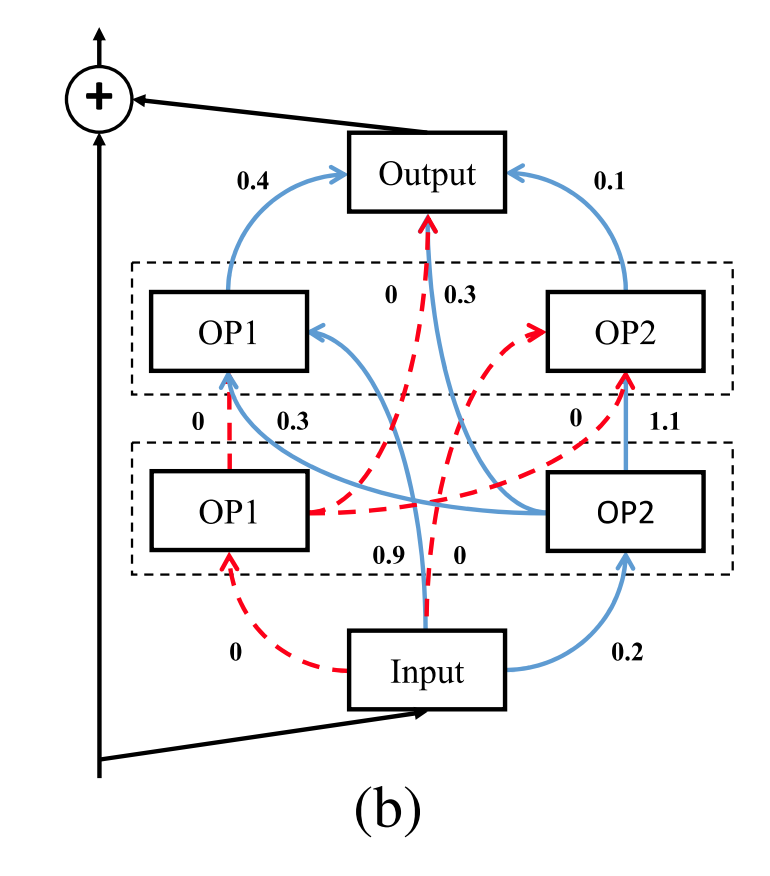
You Only Search Once: Single Shot Neural Architecture Search via Direct Sparse OptimizationXinbang Zhang*, Zehao Huang, Naiyan Wang, Shiming Xiang, Chunhong Pan TPAMI, 2021 arxiv / code We propose a model pruning formulation for Neural Architecture Search (NAS) based on sparse optimization. |
|
1st Place Solutions of Waymo Open Dataset Challenge 2020 -- 2D Object Detection TrackZehao Huang, Zehui Chen+, Qiaofei Li+, Hongkai Zhang, Naiyan Wang arxiv, 2020 arxiv 1st place solution of Waymo Open Dataset Challenge 2020 in 2D detection track. |
|
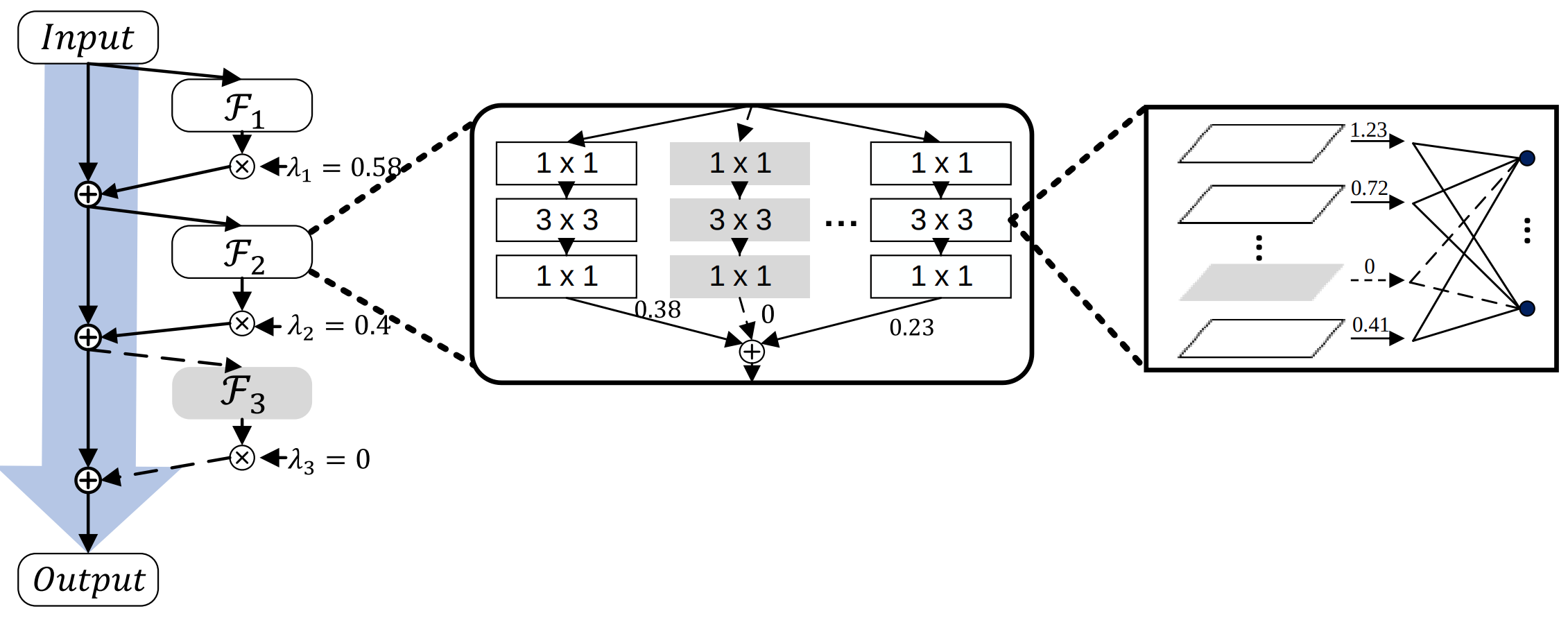
Data-Driven Sparse Structure Selection for Deep Neural NetworksZehao Huang, Naiyan Wang ECCV, 2018 arxiv / code We propose a framework to learn and prune deep models in an end-to-end manner. |
|
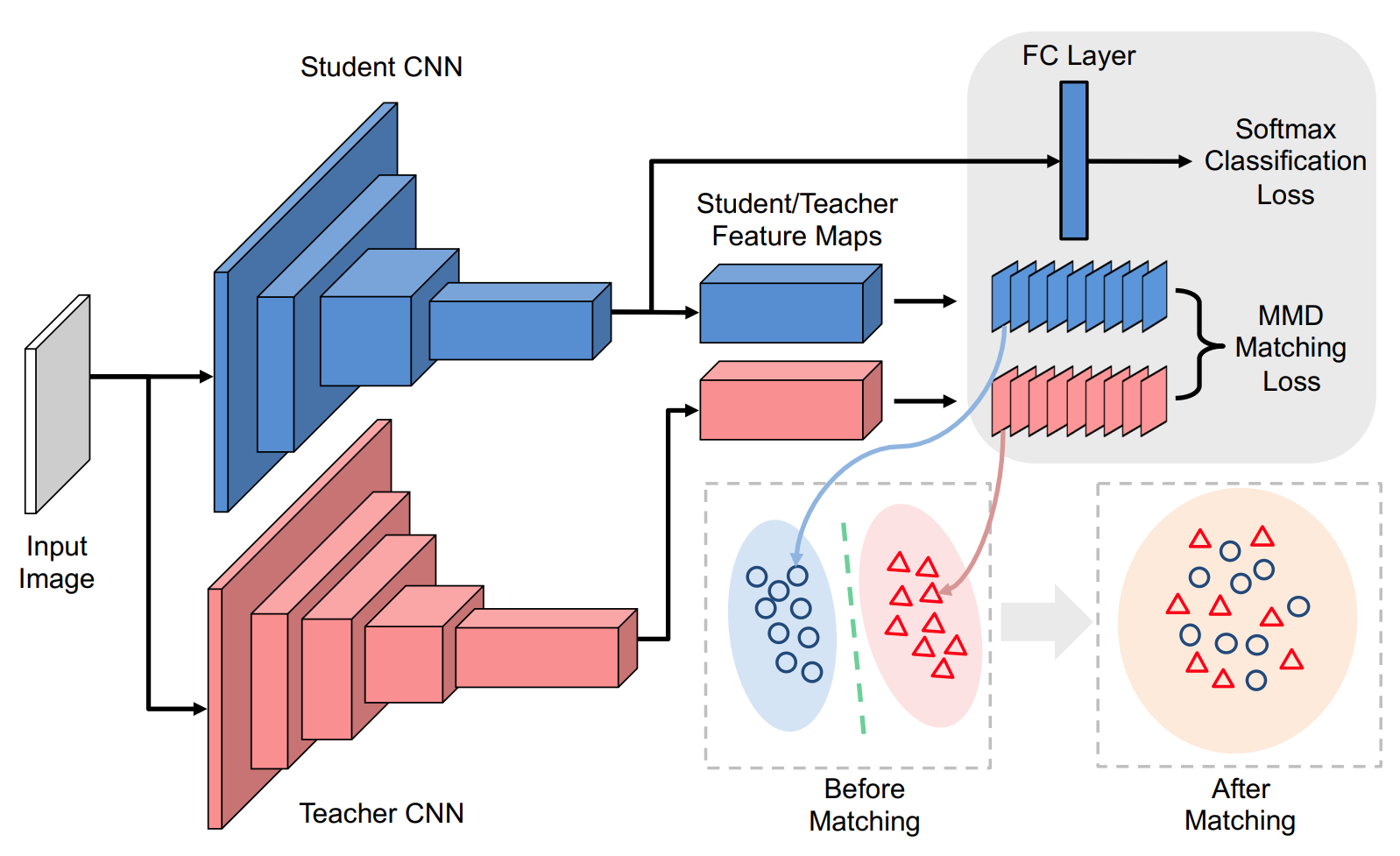
Like What You Like: Knowledge Distill via Neuron Selectivity TransferZehao Huang, Naiyan Wang arxiv, 2017 arxiv / code We propose a framework for knowledge distillation by minimizing the Maximum Mean Discrepancy. |
|
Design and source code from Leonid Keselman's website |